Falcon 500 Powered by Talon FX
Falcon 500 Powered by Talon FX
SKU:19-708850
Out of stock
Couldn't load pickup availability
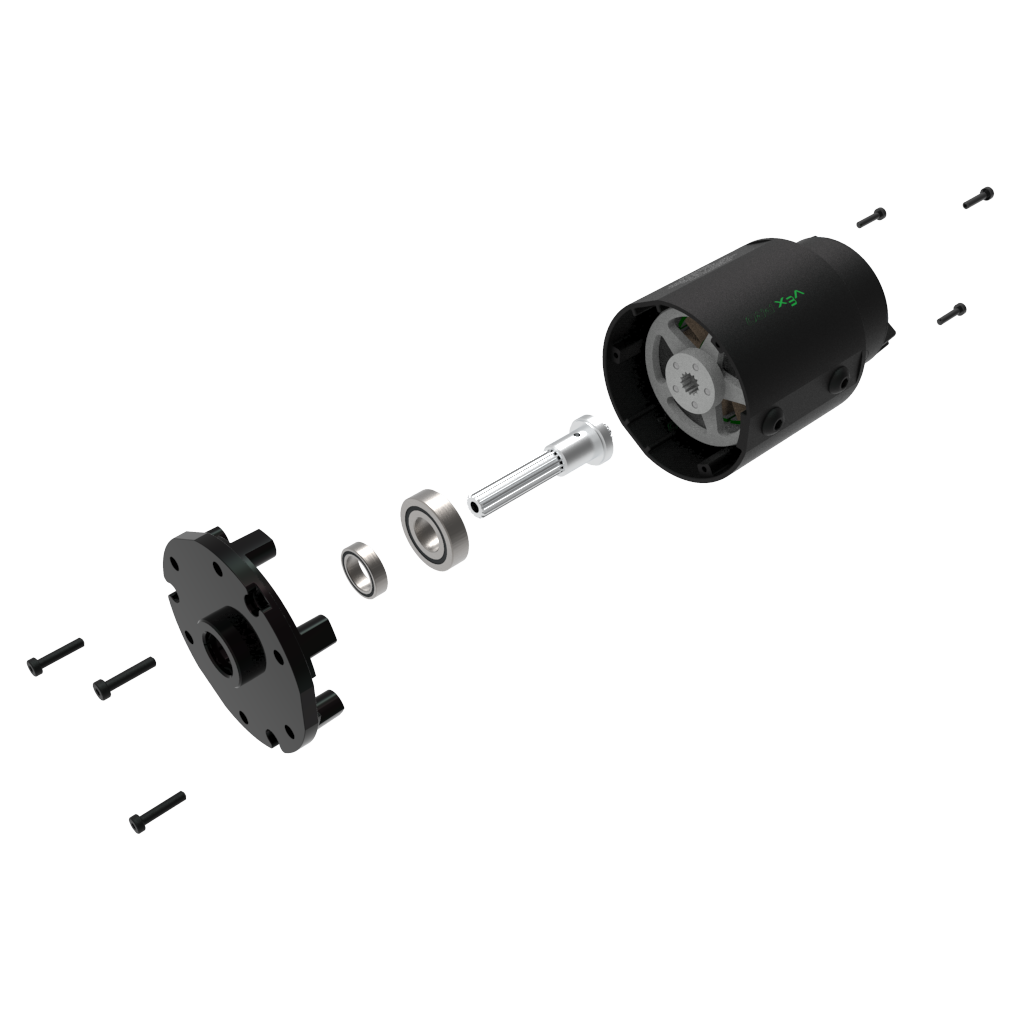
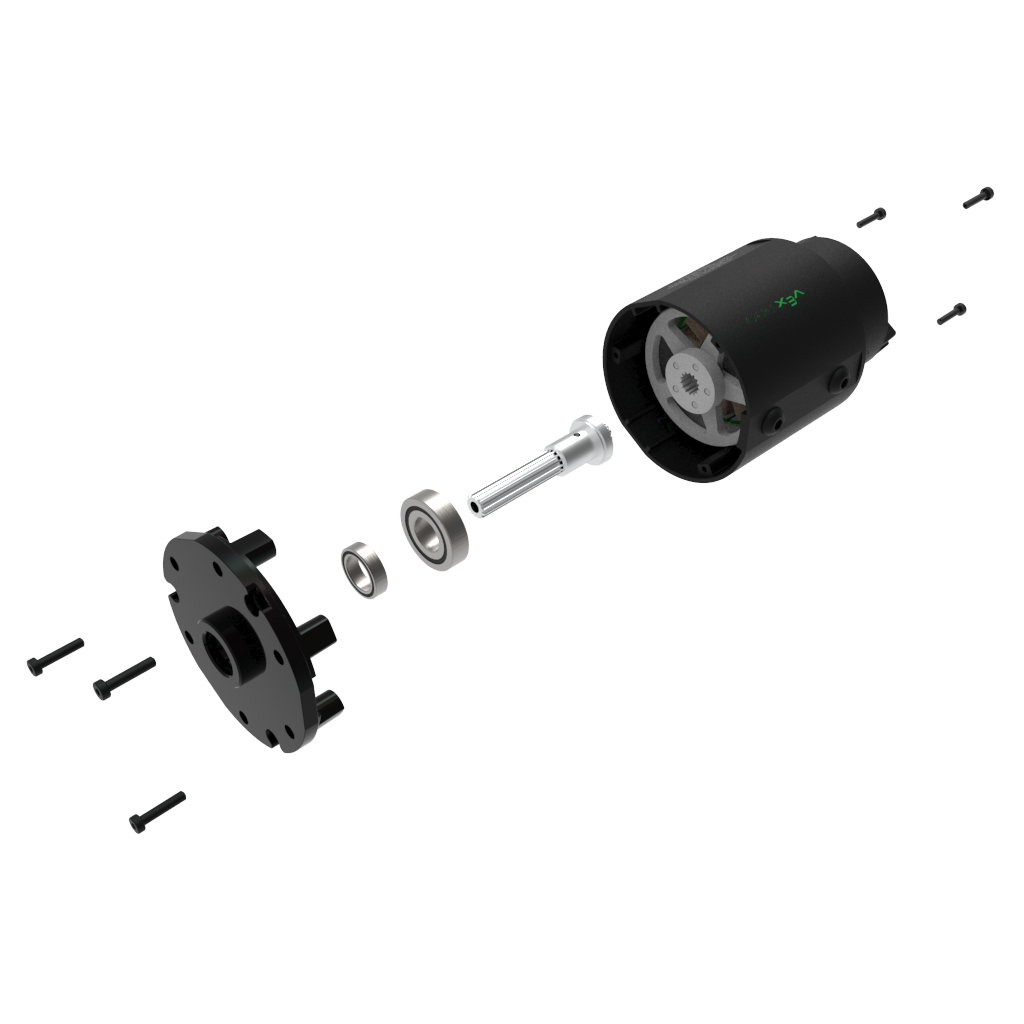
The Falcon 500 powered by Talon FX is a brushless motor with an integrated motor controller and high-resolution encoder, custom designed specifically for the FIRST Robotics Competition, through a collaboration between Cross the Road Electronics and VEX Robotics.
|
AVAILABILITY: Falcon 500s are out of stock for the 2023 season. NOTE: There is a known issue where 2022 (and earlier) Falcon 500 motors may not have adequate Loctite applied to the shaft retention screws. |
Features
Falcon 500 / Talon FX Features:
- A motor and motor controller assembly all in one product
- Integrated rotor sensor (2048 steps per rotation)
- CIM/Mini-CIM hole compatibility (2" Hole Pattern)
- Interchangeable, keyless, spline shafts
- Full aluminum case with cooling port
- Reverse polarity protection (fewer costly wiring mistakes)
- LED indicators blinking proportionately to output speed for easier debugging.
- Brake configuration via Brake/Coast button
- PWM Calibration via Brake/Coast button
- Trapezoidal commutation
- CAN bus or PWM control automatically detected over the same wires (pioneering feature of CTR-Electronics controllers)
- Limit switch feedback and auto-neutral . Can also auto-zero rotor position.
- Follower Mode - Talon can auto follow output of another
- Use Rotor Sensor or supported CAN bus sensors like CANcoder for position/velocity/closed-loop features.
- Integrated PID control running at 1Khz (with/without voltage compensation with tunable gains kP, kI, kD, kF)
- Velocity measurement with user-configurable filter
- On-board motion control using Motion Magic, which provides automatic motion-profile control via simple configuration.
- Independent limits for supply current and stator current
- Robust bootloader and reliable field-upgrade (no physical button required, no “stuck states” that requires user intervention)
-
CAN FD Compatible
 and is supported by CANivore
and is supported by CANivore
|
|
Graphical Software and API:
|
Phoenix Pro (new API available in 2023) :
- Supports FOC Commutation (which increases peak power by ~15%)
- API and firmware features all use canonical units
- New Documentation tailored for Pro use
- Verbosely named control requests replaces the flat API surface of Phoenix v5
- Pick your output types: duty-cycle, voltage, current-amps
- Supports several motor control modes: Open-Loop, Position, Velocity, Motion Magic
- Improved velocity filter: No config required, Kalman filter works automatically.
- Improved PID control: new kS gain, ContinuousWrap added for swerve azimuth
- Improved Motion Magic: New Jerk Config, ContinuousWrap added
- Improved Remote CANcoder feature: CANcoder and rotor are automatically fused, reduces effect of backlash, no startup complexity on sensor bootup.
- Improved Limit Switch: auto-set position on limit to custom nonzero values
- Improved Follower: Follower will match commutation type and output type (duty-cycle vs torque-current) automatically.
- CANivore Timesync: Synchronize sensor timestamps across many devices - great for swerve odometry
- C++/Java supported. LabVIEW beta is available
- Hardware Licenses are downloaded per device or per CANivore depending on preference.
Motor Performance
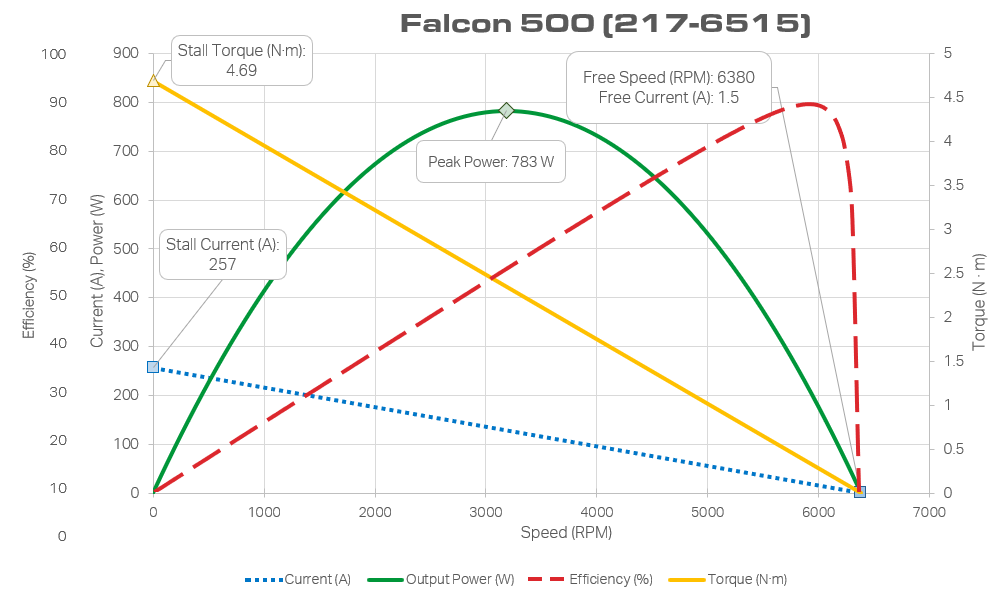
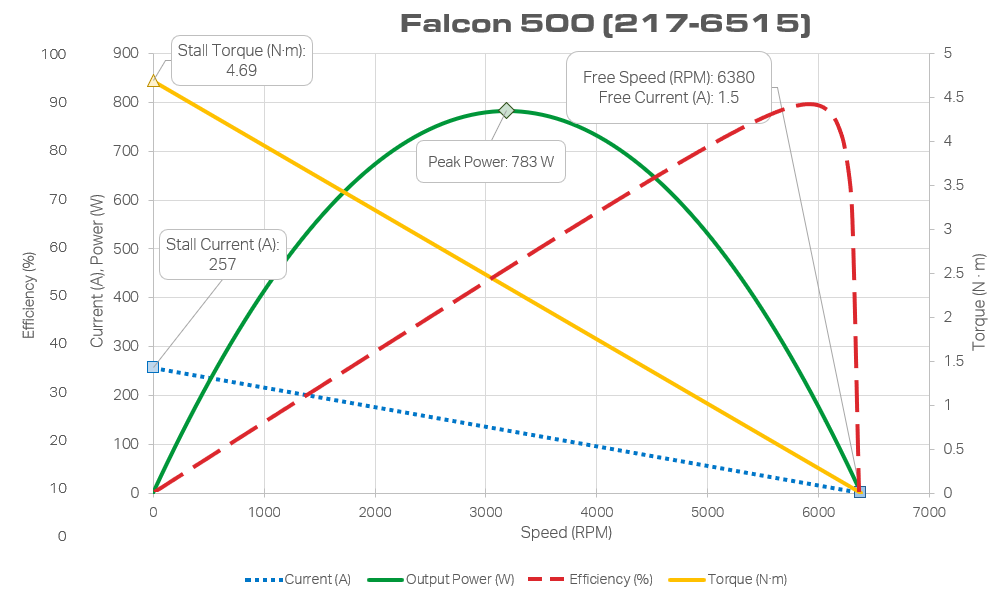
Trapezoidal Commutation
When using Phoenix v5 API, the motor performance follows the curve below.


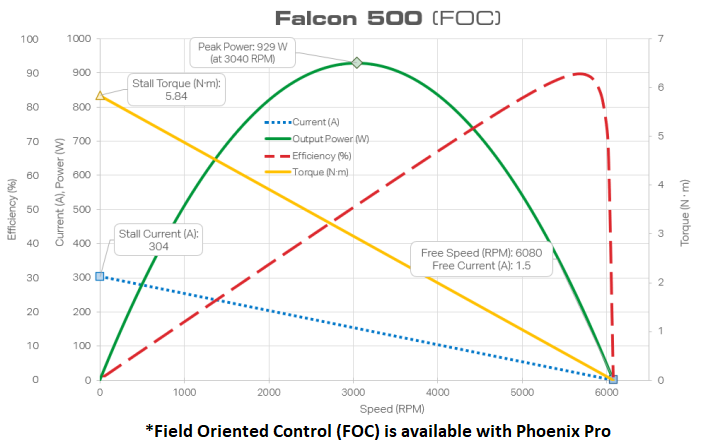
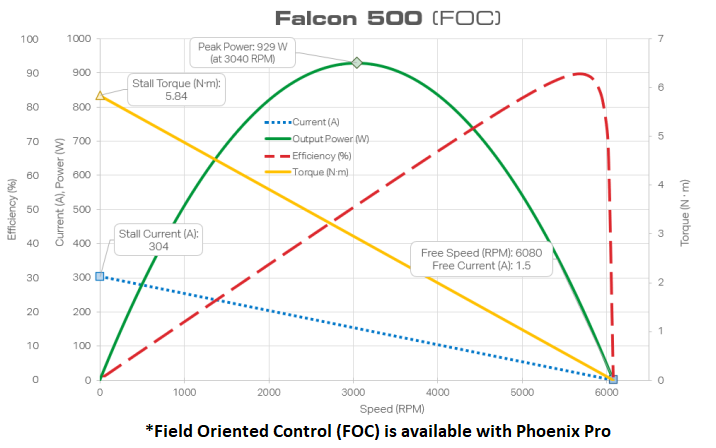
Field Oriented Control (FOC)
When using Phoenix Pro API, user can select between the FOC curve below, or the Trapezoidal curve above.
Benefits of FOC:
- More Efficient: The Falcon 500 will use less electrical power for the same mechanical power result.
- Greater Acceleration: Higher maximum torque allows for greater acceleration.
- Easier to Control: More accurate & smooth control of the motor in all uses because of consistent torque. This results in easier/faster tuning to reach the desired performance.
- Higher RPM When Loaded: Higher power generally results in higher motor RPM when the motor has a load to drive. *Note that free-speed maximum RPM is slightly lower (see motor curves above and below for full profile).
- Flexible Control Types: Multiple output types lets you choose the closed-loop output (Voltage, Duty Cycle, or Torque) while still gaining the power benefits of FOC.
Sounds too good to be true? Compare the FOC Motor Curve below to the standard Motor Curve above!

Technical Specifications
| Kit Contents | Falcon 500 with Integrated Talon FX, Shaft Spacers, Power, Ground, Output, CAN cables come pre-attached |
|---|---|
| Nominal Voltage | 12VDC |
| Material Type | Cast Aluminum |
| Material Finish | Black Anodized for superior performance & heat dissipation. |
| Dimensions | 60mm (2.36”) Dia. X 81mm (3.18”) Long |
| Supported Communication Protocols | PWM, CAN |
| Direct Limit Switch Input | Yes |
| PWM Input Pulse (high time) | 1 - 2 ms nominal |
| PWM Input Rate (period) | 2.9 - 100 ms |
| Minimum Throttle (Deadband) | Adjustable 0.1%-25% |
| Free Speed RPM/Current* | 6380 RPM/1.5A |
| Stall Current/Torque* | 257A/4.69Nm |
| Power @ 40A/12VDC* | 400W Output (83% efficiency) |
| Peak Efficiency* | 256W Output (87% efficiency) |
| Built-In Encoder Feedback | 2048 Steps Per Rotation |
| P/N | 19-708850 |
* Measured using Trapezoidal Commutation. When using Phoenix Pro, user can switch between Trapezoidal and FOC, see motor curves for performances changes.