Pigeon 2.0: 9-Degrees of Freedom IMU with AHRS
Pigeon 2.0: 9-Degrees of Freedom IMU with AHRS
SKU:21-737785
In stock
Regular price
$199.99 USD
Regular price
Sale price
$199.99 USD
Unit price
per
Shipping calculated at checkout.
Couldn't load pickup availability
Pigeon 2.0 is the next evolution in the family of Pigeon IMUs. With no on-boot calibration or temperature calibration required and dramatic improvement to drift, the Pigeon is the easiest IMU to use yet.
Features
- Nine Degrees of Freedom (3 Axis Accelerometer, 3 Axis Gyroscope, 3 Axis Magnetometer
- Full AHRS: Yaw, Pitch, Roll
- Quaternion Output
- Gravity Vector Output
- Boot-up does not require stillness. Get useful heading information as soon as it is powered on.
- Kalman Filter fusion algorithm
- Gyro automatically re-biases after 4 seconds of no-motion
- Temperature Compensation for temperature sensitive component
- Temperature factory-calibrated
- Accelerometer factory-calibrated
- Gyroscope factory-calibrated
- No user-calibration required for accurate 6-axis fusion
- Mount IMU in any orientation (not limited to horizontal or vertical orientation) - see Hardware User Manual for details
- Yaw is continuous, ideal for robot heading servos and motion control
- Wide Input Voltage Range 6V – 28V
- Protection Reverse Input Power Protection
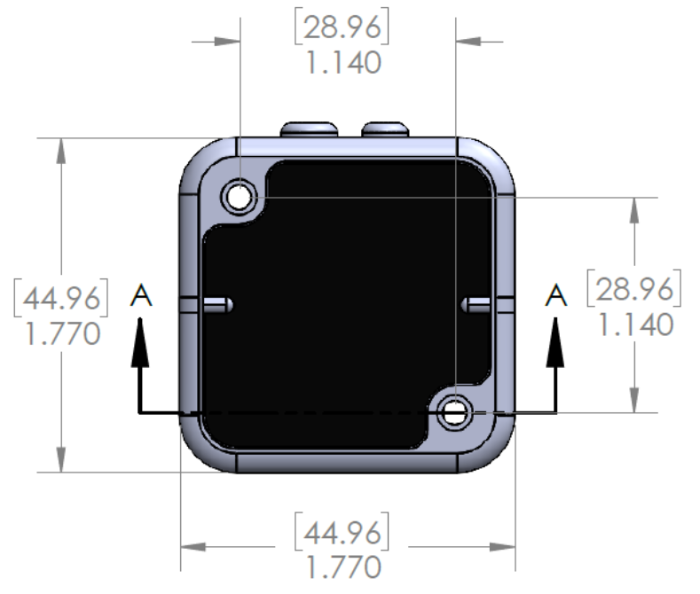
- Polycarbonate housing prevents debris from entering inside device
- One wire lead-pair for power
- Two wire lead-pairs for CAN Bus (3-pin connector, one male, one female) for daisy chaining devices)
- Robust bootloader and reliable field-upgrade (no physical button required, no “stuck states” that requires user intervention)
- Wirelessly check, configure and field-upgrade using roboRIO Wi-Fi and Phoenix Tuner.
- Users can download software API binaries on our reliable Maven server (99.9% reliability)
- Hardware Simulation Support
- Supports CAN bus and CAN FD bus.
- Supported by CANivore and roboRIO use case
Note: Latest Pigeon 2.0 hardware update requires a software update.
TIP: Pigeon 2.0 can be used with Phoenix Pro!
Yaw Drift
| During No Motion | ~0.12 degrees per hour |
| During Motion (with 4 second no-motion after boot-up) | ~0.4 degrees per minute |
| During Motion (instantly after boot-up) | ~1.0 degree per minute |
Technical Specifications
See Hardware User Manual for full specifications.
| Weight | 1.07 ounces (30.39g) |
| Nominal Input Voltage | 12 Volts |
| Min/Max Voltage Range | 6V - 28V |
| Typ. Current Draw @12V | 40mA |
| Typ. Current Draw @28V | 21mA |
| Gyroscope Range (dps) | 125 - 2000 |
| Gyroscope Resolution | 16 bits |
| Accelerometer Range | +/- 8g |
| Accelerometer Resolution | 16 bits |
| Magnetometer Range | +/- 1150 uT |
| Magnetometer Resolution | 0.3 uT |
| Compass Accuracy (with Cal) | ~1 degree |